|
Hey! I am a Research Scientist at Waymo. I finished my PhD in Computer & Information Science at the University of Pennsylvania and my advisor was Prof. Kostas Daniilidis. I was fortunate to work as a Machine Learning Intern at the 3D Vision Team for Apple Maps, a Research Scientist Intern at Meta Reality Lab, and a Visiting Fellow at Microsoft Research Asia. Email / Google Scholar / GitHub / LinkedIn |

|
|
|
|
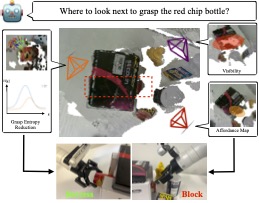
Boshu Lei*, Wen Jiang*, Kostas Daniilidis Under Review arxiv / Bibtex An active robotic grasping method that leverages a calibrated energy-based model to guide the grasping process with information gain. |
|
Wen Jiang*, Boshu Lei*, Katrina Ashton, Kostas Daniilidis ICCV, 2025 arxiv / code / Bibtex An active Gaussian Splatting SLAM system with active exploration strategy, more accurate mapping and localization |
|
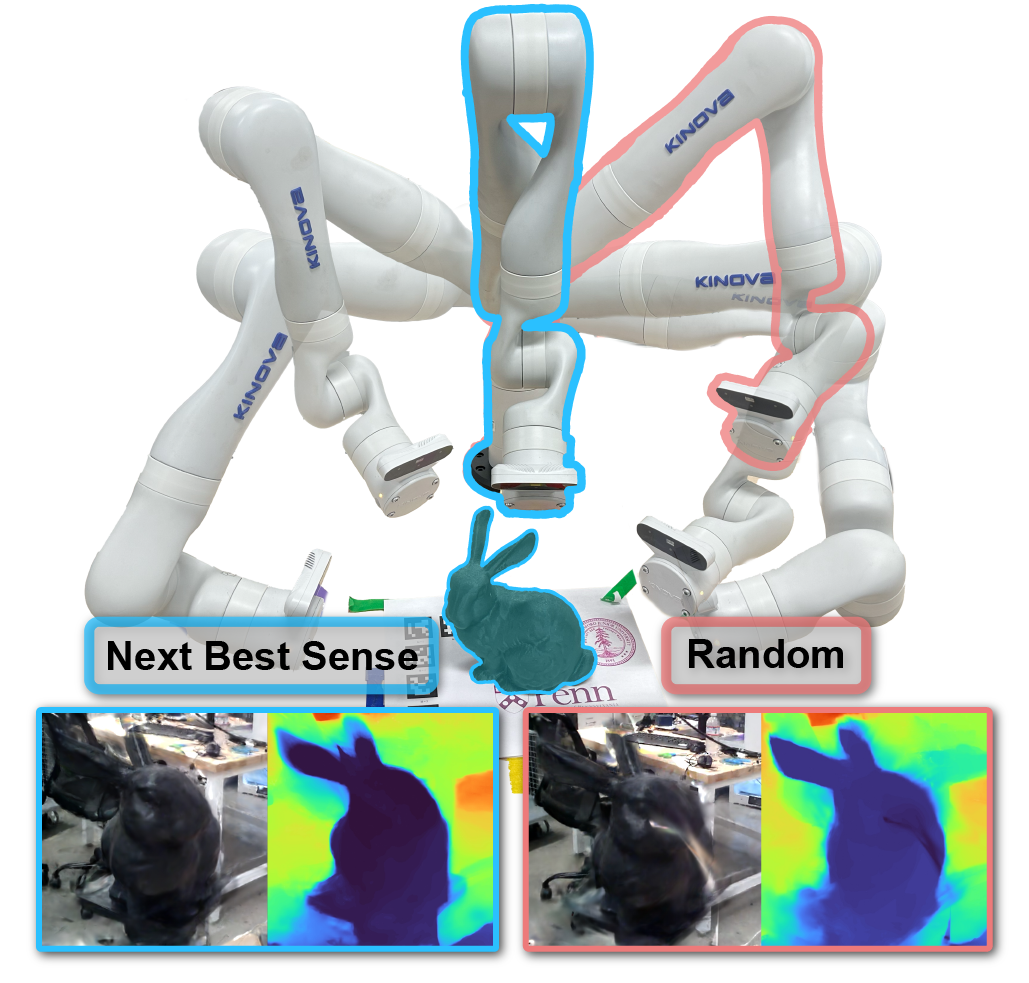
Matthew Strong*, Boshu Lei*, Aiden Swann, Wen Jiang, Kostas Daniilidis, Monroe Kennedy III ICRA, 2025 Project Page arxiv / code / Bibtex / video We propose a framework for active next best view and touch selection for robotic manipulators using 3D Gaussian Splatting (3DGS) |
|
Guangyi Liu*, Wen Jiang*, Boshu Lei*, Kostas Daniilidis, Nader Motee Under Review arxiv / Bibtex We introduce a novel approach to enhance robot navigation safety and improve 3D scene understanding by extending beyond conventional uncertainty-based methods. |
|
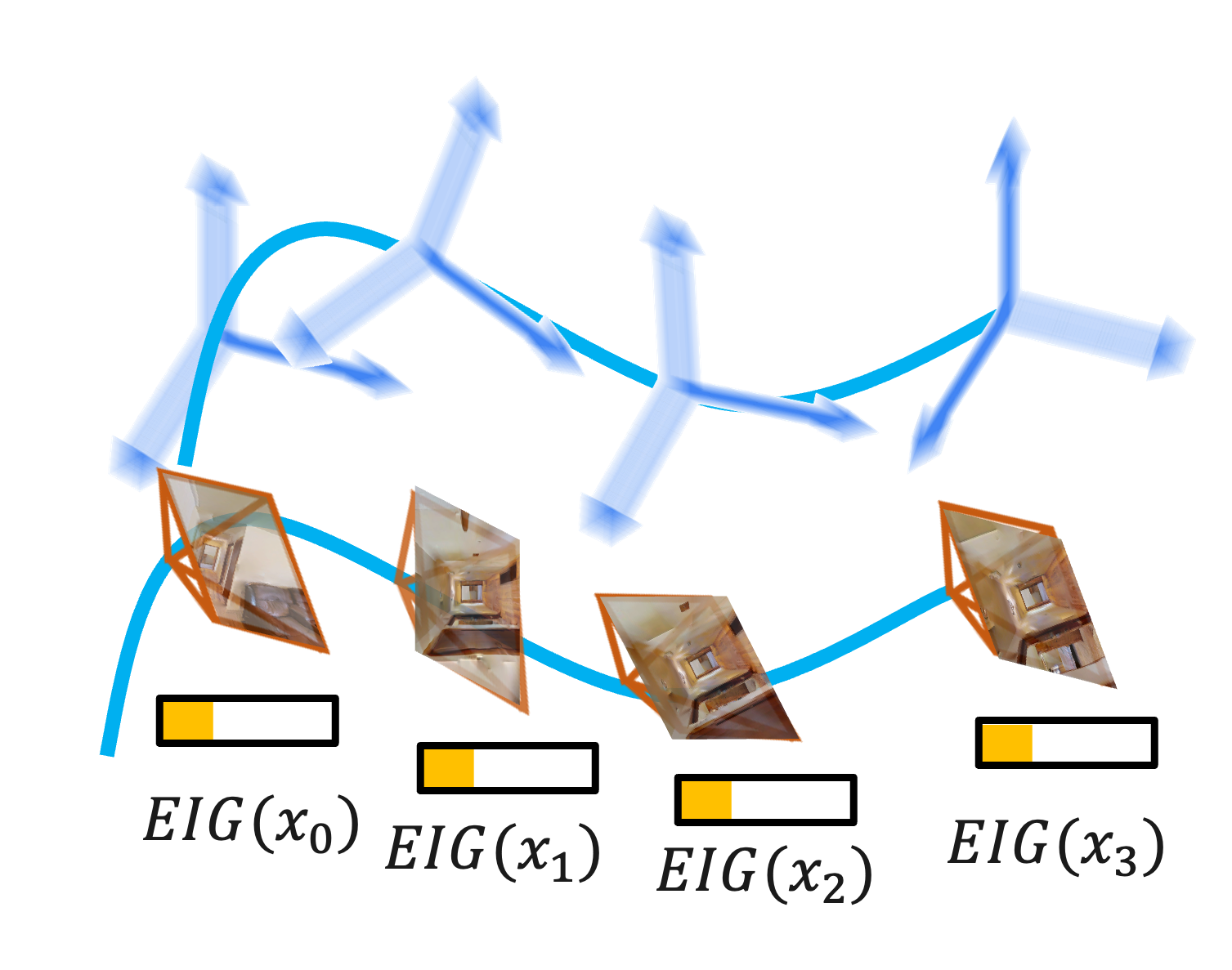
Wen Jiang, Boshu Lei, Kostas Daniilidis ECCV Oral, 2024 Project Page / arxiv / Code / Bibtex FisherRF compute the Fihser Information for 3D Gaussian Splatting and other Radiance Fields and could select next best views or quantify pixel-wise uncertainty for its renderings. |

|
Ziyun Wang, Friedhelm Hamann, Kenneth Chaney, Wen Jiang, Guillermo Gallego, Kostas Daniilidis arxiv preprint, 2023 Project Page / arxiv / Paper / Bibtex We propose a novel task called event-based continuous color video decompression , pairing single static color frames and events to reconstruct temporally continuous videos. |

|
Wen Jiang, Kostas Daniilidis arxiv preprint, 2022 arxiv / Code(coming soon) / Bibtex We propose a novel method for 3D shape completion from a partial observation of a point cloud. |
|
Junting Dong, Qi Fang, Wen Jiang, Yurou Yang, Qixing Huang, Hujun Bao, Xiaowei Zhou T-PAMI, 2021 Project page / Supplementary / Code / Bibtex |


|
Wen Jiang*, Nikos Kolotouros*, Georgios Pavlakos, Xiaowei Zhou, Kostas Daniilidis CVPR, 2020 Project Page / Paper / Code / Bibtex End-to-end reconstruction of multiple people using two novel geometric losses that encourage coherent 3D estimates |
|
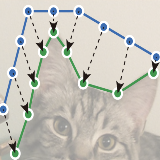
Sida Peng, Wen Jiang, Huaijin Pi, Hujun Bao, Xiaowei Zhou CVPR, 2020 Oral presentation Arxiv / Code / Bibtex This paper introduces a novel contour-based approach named deep snake for real-time instance segmentation. |
|
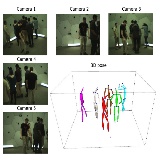
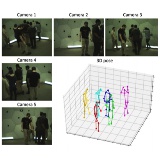
Junting Dong, Wen Jiang, Qixing Huang, Hujun Bao, Xiaowei Zhou CVPR, 2019 Project page / Arxiv / Supplement / Video / Code / Bibtex This paper addresses the problem of 3D pose estimation for multiple people in a few calibrated camera views. |
|
|

|
Reviewer
CVPR2022-2023, |
|
Teaching Assistant
CIS 580: Machine Perception CIS 680: Advanced Topics in Machine Perception |
|
|